Управление шаговым двигателем микроконтроллер схема - AVR - Проекты на микроконтроллерах AVR

Драйвер шагового двигателя своими руками
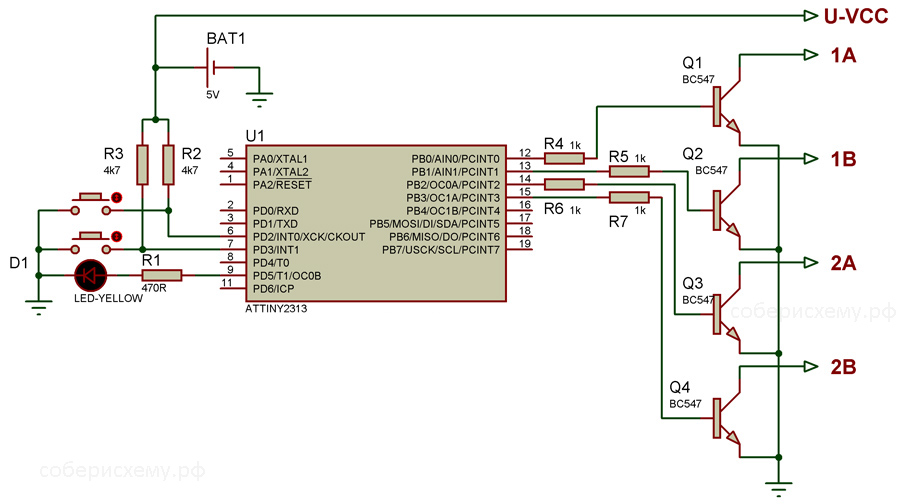
Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах 5-и дюймовых и еще много где.
 для шаговика на AVR")











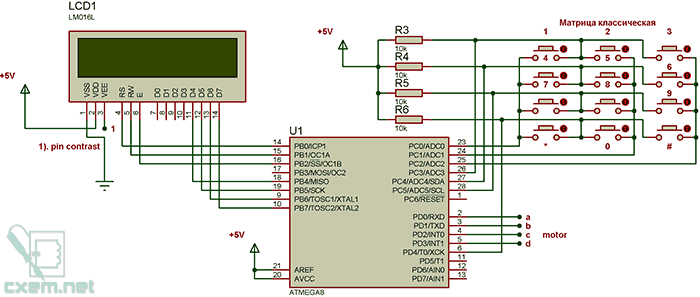
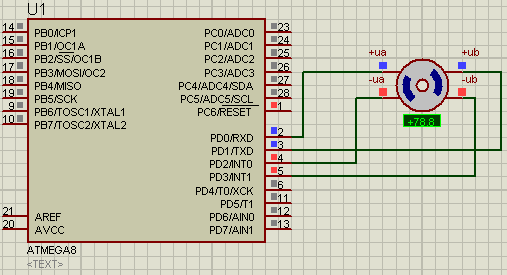
Сегодня мы попробуем к микроконтроллеру Atmega8a подключить шаговый двигатель. Шаговые двигатели — это такие двигатели, которые посредством подачи напряжения на определённую обмотку переводят свой ротор в определённое место, тем самым достигается более точное управление угловой скоростью. Можно также, в принципе, управлять и положением ротора, но это уже как-то больше сервоприводы, с которыми, мы, возможно, тоже, когда-то столкнёмся. Шаговые двигатели в наше время приобретают всё больший интерес, так как в наш век точной электроники люди что-то мастерят движущееся, наподобие роботов и каких-то умных машин, также доходит дело до определённых летательных аппаратов и прочих устройств. Поэтому я также не обошел этот вопрос стороной и решил также что-то об этом рассказать и подключить шаговый двигатель к контроллеру и попробовать им поуправлять.










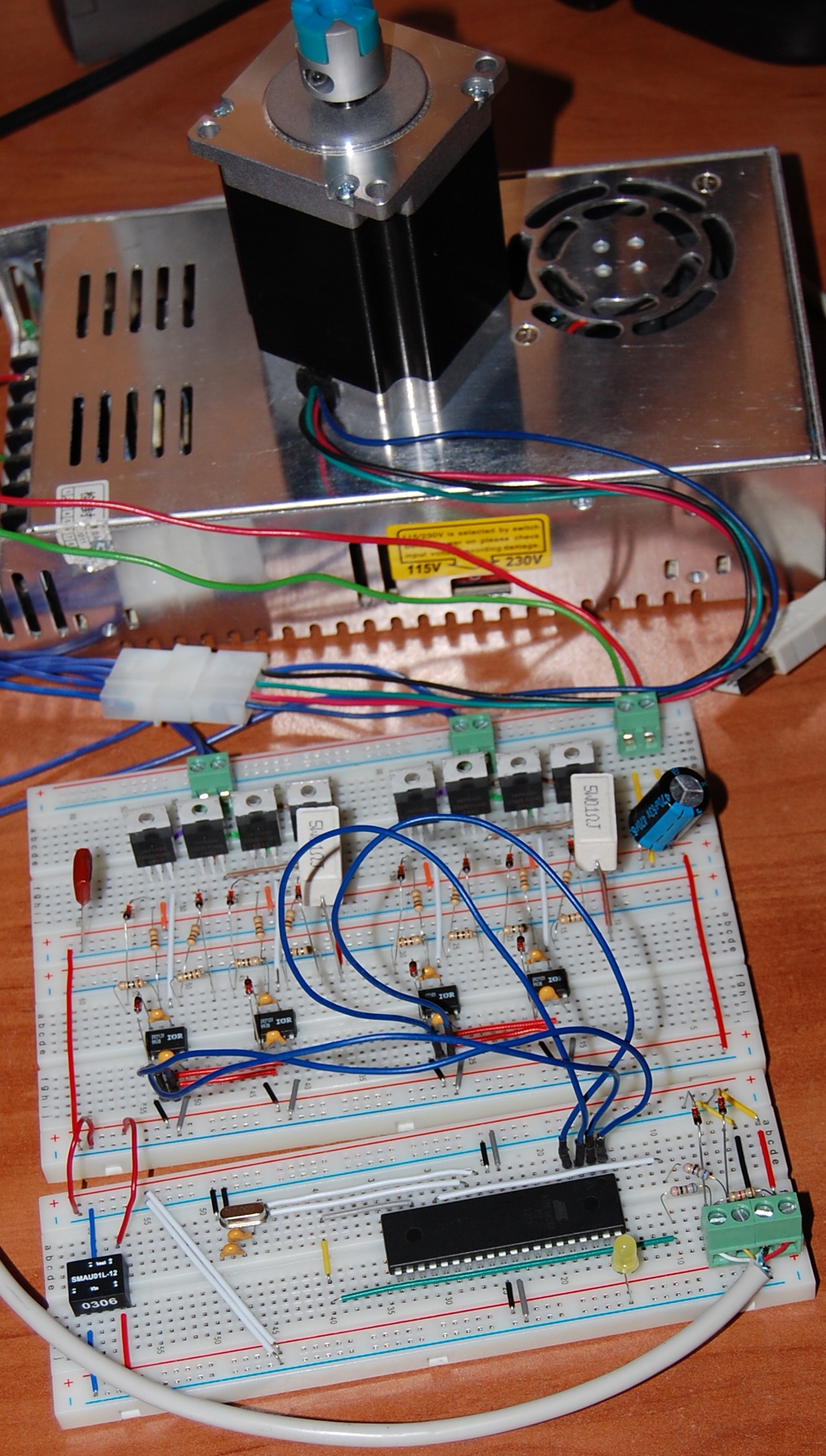
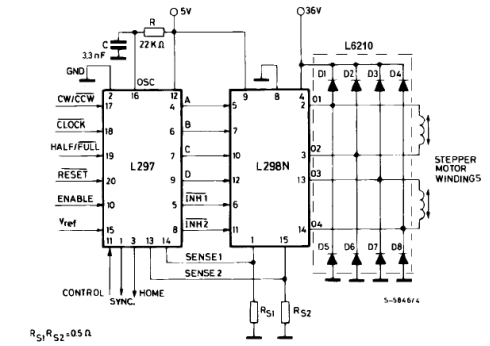
Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время коммутации. Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом. При коммутации полумосты прикладывают к концам обмоток положительное или отрицательное напряжение.